
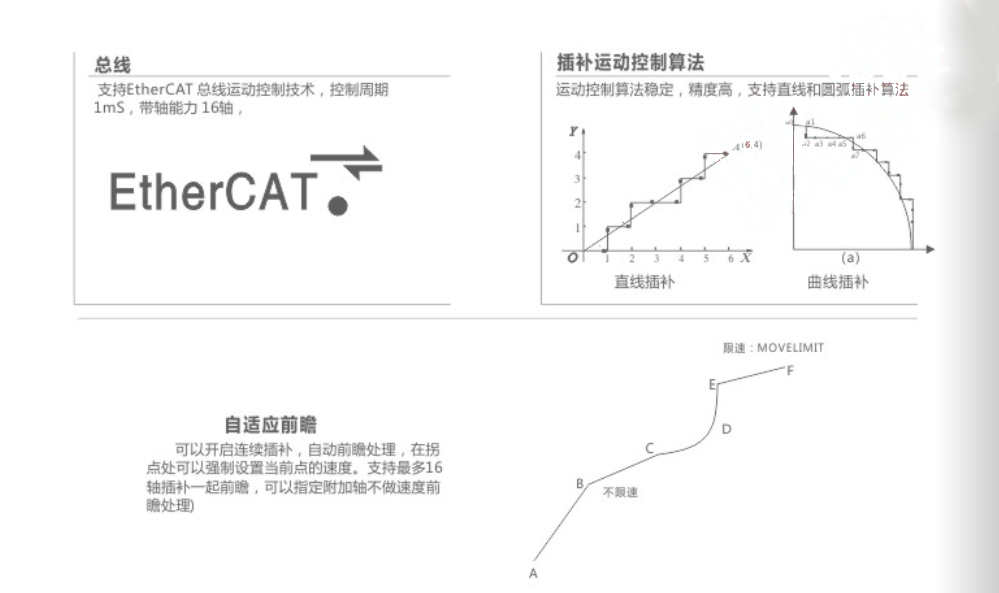



LMC500ЙиНкЁіЛњЦїШЫПижЦЦїЃЌжЇГжEtherCATзмЯпдЫЖЏПижЦММЪѕЃЌПижЦжмЦк1msЃЌДјжсФмСІ16жсЁЃдЫЖЏПижЦЫуЗЈЮШЖЈЃЌОЋЖШИпЃЌжЇГжжБЯпКЭдВЛЁВхВЙЫуЗЈЁЃжЇГжRS485,EthernetЕШЖржжЙЄвЕзмЯпНгПкЃЌПЩЭЈЙ§ModbusЛђTCP/IPЕШавщгыЭтЩшЭЈбЖЁЃгІгУЗЖЮЇЃКСљЙиНкЛњЦїШЫЁЂЫФЙиНкЛњЦїШЫЁЂSCARAЛњЦїШЫЕШЖржжЛњЙЙФЃаЭКЭЙЄвЕздЖЏЛЏЩшБИЁЃ
Copyright © ЩюлкЪаРЪгюаОПЦММгаЯоЙЋЫО |
